PID的计算公式
的有关信息介绍如下:PID的增量型公式:
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】
PID算法具体分两种:一种是位置式的 ,一种是增量式的。
位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
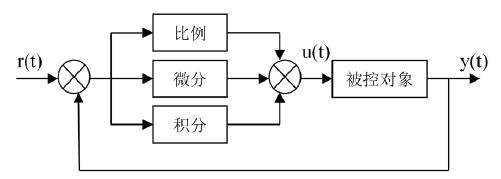
PID控制原理:
本系统通过摆杆(辊)反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
PID系统特点:
1、主驱动电机速度可以通过电位器来控制,把S350设置为SVC开环矢量控制,将模拟输出端子FM设定为运行频率,从而给定收卷用变频器的主速度。
2、收卷用S350变频器的主速度来自放卷(主驱动)的模拟输出端口。摆杆电位器模拟量
信号通过CI通道作为PID的反馈量。S350的频率源采用主频率Ⅵ和辅助频率源PID叠加的方式。通过调整运行过程PID参数,可以获得稳定的收放卷效果。
3、本系统启用逻辑控制和卷径计算功能,能使系统在任意卷径下平稳启动,同时两组PID参数可确保生产全程摆杆控制效果稳定。
版权声明:文章由 问百问 整理收集,来源于互联网或者用户投稿,如有侵权,请联系我们,我们会立即处理。如转载请保留本文链接:https://www.wenbwen.com/answer/123963.html